
Shankar_ch.4
值得注意的是,在Postulate II 中,动量算子在坐标空间的“矩阵”其中元素为:$\bra{x}P\ket{x’}=-i\hbar \delta’(x-x’)=-i\hbar\frac{d}{dx}\delta(x-x’)=i\hbar\frac{d}{dx’}\delta(x-x’)$,要小心求导是对$x$还是$x’$
Ex 4.2.1
(1) 三个本征值1,0,-1
(2)该态为$\begin{pmatrix}
1 \\
0 \\
0 \\
\end{pmatrix}$ 所以计算期望值:
$$
\langle L_x\rangle=
\begin{pmatrix}
1 & 0 & 0 \\
\end{pmatrix}\frac{1}{\sqrt{2}}\begin{pmatrix}
0 & 1 & 0 \\
1 & 0 & 1 \\
0 & 1 & 0 \\
\end{pmatrix}
\begin{pmatrix}
1 \\
0 \\
0 \\
\end{pmatrix}=0
$$
同理$L_x^2=\frac{1}{2}\begin{pmatrix}
1 & 0 & 1 \\
0 & 2 & 0 \\
1 & 0 & 1 \\
\end{pmatrix}$所以期望值为:
$$
\langle L_x^2 \rangle=
\begin{pmatrix}
1 & 0 & 0 \\
\end{pmatrix}\frac{1}{2}\begin{pmatrix}
1 & 0 & 1 \\
0 & 2 & 0 \\
1 & 0 & 1 \\
\end{pmatrix}
\begin{pmatrix}
1 \\
0 \\
0 \\
\end{pmatrix}=\frac{1}{2}
$$
计算不确定度的平方:
$$
\Delta L_x^2=\langle L_x^2\rangle-\langle L_x\rangle^2=\frac{1}{2}
$$
或者按照书中的定义:
$$
\Delta L_x=
\left(\begin{pmatrix}
1 & 0 & 0 \
\end{pmatrix}
(L_x-0)^2
\begin{pmatrix}
1 \\
0 \\
0 \\
\end{pmatrix}\right)^{1/2}=\frac{1}{\sqrt{2}}
$$
(3) 先计算$L_x$的本征问题:
$$
\begin{vmatrix}
-\lambda & 1 & 0 \\
1 & -\lambda & 1 \\
0 & 1 & -\lambda \\
\end{vmatrix} =0
$$
求得值为$0,\pm \sqrt{2}$本征向量在$\mathbb{R^3}$中的坐标表示为:
$$
\frac{1}{\sqrt{2}}
\begin{pmatrix}
1\\
0\\
-1\\
\end{pmatrix}
\hspace{3em}
\frac{1}{2}
\begin{pmatrix}
1\\
\sqrt{2}\\
1\\
\end{pmatrix}
\hspace{3em}
\frac{1}{2}
\begin{pmatrix}
1\\
-\sqrt{2}\\
1\\
\end{pmatrix}
$$
发现$L_z$的基也即欧式空间的标准基,所以答案就是如上向量,记为$\ket{\psi_1},\ket{\psi_2},\ket{\psi_3}$
(4) 对于$\begin{pmatrix}
0\\
0\\
1\\
\end{pmatrix}$而言,通过$L_x$的基展开,有:
$$
\begin{pmatrix}
0\\
0\\
1\\
\end{pmatrix}=-\frac{1}{\sqrt{2}}\ket{\psi_1}+\frac{1}{2}\Ket{\psi_2}+\frac{1}{2}\Ket{\psi_3}
$$
注意这里的求解线性组合系数会自动归一化,因为这两个正交归一基之间的映射为等距同构。答案:得到三本征态之一,概率分别为$\frac{1}{2},\frac{1}{4},\frac{1}{4}$
(5) 易知$L_z^2=\begin{pmatrix}
1 & 0 & 0\\
0 & 0 & 0\\
0 & 0 & 1\\
\end{pmatrix}$,其本征值为1对应的本征空间为$E(1,L_z^2)=\text{span}\left( e_1, e_3\right)$因此测量后状态为$e_1$与$e_3$张成空间中的某个向量,计算落入该子空间而非$0$对应的子空间的概率可考虑:
$$
\ket{\psi}=\frac{1}{2}e_2+\frac{\sqrt{3}}{2}v
$$
其中$v$指代$E(1,L_z^2)$中的某个单位模长的向量,注意上述表达式是唯一的,因为不同本征空间是直和关系。故测得本征值为$1$对应的就是坍缩到$v$态,概率$\frac{3}{4}$。
若之后立刻进行$L_z$的测量,将该态$v$用$L_x$的本征向量$(e_1,e_2,e_3)$展开:
$$
v=\frac{1}{2}e_1+\frac{1}{\sqrt{2}}e_3
$$
故$\frac{1}{3}$可能得到测量值$1$,对应$e_1$态,$\frac{2}{3}$可能得到测量值$-1$,对应$e_3$态。
本题利用了一个巧妙的$L_z$将广义本征空间与本征空间联系在一起,($L_z^2$的核空间即$L_z$的广义本征空间)
(6) $\delta$之间的相对相位能够体现出不同结果,是有意义的,代表不同状态
4.2 notes
P131 证明在非简并情况下,两个算子互易等价于有共有的一组本征向量能够组成基(注意,本证明只处理有限维向量空间,毕竟在无限维的空间中我连谱定理都不会):
$\Lambda$和$\Omega$共有的本征向量能够组成基$\Rightarrow$互易:
设这组基为$v_1,v_2,v_3\dots v_n$,其中$n=\text{dim}\mathbb{V}$。则$\forall v\in \mathbb{V}$有:
$$
\begin{align*}
\Lambda\Omega v&=\Lambda\Omega (\sum_{i=1}^n c_i v_i)=\Lambda \sum_{i=1}^n c_i \Omega v_i
\newline
&=\Lambda \sum_{i=1}^n c_i \omega_i v_i=\sum_{i=1}^n c_i\omega_i \Lambda v_i=\sum_{i=1}^n c_i \omega_i \lambda_i v_i
\end{align*}
$$ 对于$\Omega \Lambda v$得到完全相同结果。$\Lambda$和$\Omega$互易$\Rightarrow$共有的本征向量能够组成基:
只需要证明任一$\Lambda$的本征向量组成的基$\Ket{\lambda_1},\Ket{\lambda_2}\dots \Ket{\lambda_n}$也是$\Omega$的本征向量即可。找出使得$\Omega \ket{\lambda_i}\neq 0$的那个$\ket{\lambda_i}$:
$$
\Omega \Lambda \Ket{\lambda_i}=\Lambda \Omega \Ket{\lambda_i}\iff \lambda_i \Omega \Ket{\lambda_i}=\Lambda \Omega\Ket{\lambda_i}
$$ 这说明非零向量$\Omega\ket{\lambda_i}$落在$E(\lambda_i,\Lambda)$中,在非简并的情况下,因为是一维不变子空间所以$\Omega\ket{\lambda_i}=\omega\ket{\lambda_i}$对于$\Omega \ket{\lambda_j}=0$ 的那些向量$\ket{\lambda_j}$而言,自然也是$\Omega$的本征向量,因为在$\text{null} \Omega=E(0,\Omega)$中
P134 验证密度矩阵性质:
(1) 使用第一章结论,以及$p_k\in\mathbb{R}$的事实(以下省略$\mathcal{M}$记号,不区分算子和其对应的矩阵):
$$
\begin{align*}
\bra{i}\rho^\dagger\ket{j}&=\bra{j}\rho\ket{i}^*=\bra{j}(\sum_k p_k \ket{k}\bra{k})\ket{i}^*
\newline
&=\sum_k p_k(\langle j|k\rangle\langle k|i\rangle)^*=\sum_k p_k\langle i|k\rangle\langle k|j\rangle
\newline
&=\bra{i}(\sum_k p_k \ket{k}\bra{k})\ket{j}=\bra{i}\rho\ket{j}
\end{align*}
$$
(2)
$$
\begin{align*}
\text{Tr}\rho&=\sum_i \rho_{ii}=\sum_i \bra{i}\rho\ket{i}
\newline
&=\sum_i\bra{i}(\sum_k p_k \ket{k}\bra{k})\ket{i}
\newline
&=\sum_i \bra{i}p_i\ket{i}=\sum_i p_i=1
\end{align*}
$$
(5)
$$
\begin{align*}
\text{Tr}\rho^2&=\text{Tr}\left(\sum_i\sum_k p_i\ket{i}\bra{i}p_k\ket{k}\bra{k}\right)
\newline
&=\text{Tr}\left( \sum_i p_i^2\ket{i}\bra{i}\right)
\newline
&=\sum_j \bra{j} \sum_i p_i^2\ket{i}\bra{i} \ket{j}
\newline
&=\sum_j p_j^2 \leq \left(\sum_j p_j\right)^2=1
\end{align*}
$$
P137 关于$\psi_p(x)$的归一化复习:
$$
\mathscr{F}[\delta(x-x’)]=\int_{-\infty}^\infty \delta(x-x’)e^{-ikx}dx=e^{-ikx’}
\newline
\delta(x-x’)=\frac{1}{2\pi}\int_{-\infty}^\infty e^{ik(x-x’)} dk
$$
因此,若$\psi_p(x)=\frac{1}{\sqrt{2\pi \hbar}}e^{ipx/\hbar}$ 就有正交关系:
$$
\int_{-\infty}^\infty \psi_p^*(x)\psi_{p’}(x) dx=\frac{1}{2\pi\hbar}\int_{-\infty}^\infty e^{ix(p’-p)/\hbar}dx
\newline
\newline
=\frac{1}{2\pi}\int_{-\infty}^\infty e^{ix(p’-p)/\hbar}d\left(\frac{x}{\hbar}\right)=\delta(p’-p)=\delta(p-p’)
$$
这样就得到了坐标空间中动量算符的本征函数的表达式,书中的后续步骤是以坐标空间中的形式为桥梁,得到波函数在动量本征函数上的投影
在计算$\langle p|\psi\rangle$的最后一步算了一个高斯型积分,但是之前学的都是实的情况,不涉及复的,出于数学的考量简要分析想法:
$$
\lim_{R\to \infty}\int_{-(1+ik)R}^{(1+ik)R} e^{x^2}dx=\lim_{R\to \infty}\int_{-R}^R (1+ik) e^{(1+ik)^2 x^2} dx
$$ 变量代换是可行的,化为对实变量的积分,相当于把积分路线旋转到实轴上。该积分按照复变函数的积分定义拆分为实部虚部等等,就可以验证和实高斯型积分能一样操作
下一段说$\braket{P}=0$,原因是:
$$
\braket{P}=\bra{\psi}P\ket{\psi}=\int\langle \psi|P| p\rangle
\langle p|\psi\rangle dp=\int p \langle \psi|p\rangle\langle p|\psi\rangle dp=0
$$
最后一步是因为书中已经给出$\langle p|\psi\rangle$形式,因此积分一个奇函数为$0$
Ex 4.2.2
在坐标空间中看:
$$
\begin{align*}
\braket{P}&=\bra{\psi}P\ket{\psi}=\int\langle \psi|x’\rangle \langle x’|P|\psi\rangle dx’
\newline
&=\int \langle \psi|x’\rangle \int \langle x’|P|\xi \rangle \langle \xi|\psi\rangle d\xi dx’
\newline
&=|c|^2\int \psi_r^\ast (x’) \int -i\hbar \frac{d}{dx’}\delta(x’-\xi) \psi_r(\xi) d\xi dx’
\newline
&=|c|^2\int \psi_r^\ast(x’) \int -i\hbar \delta(x’-\xi) \frac{d}{d\xi}\psi_r(\xi) d\xi dx’
\newline
&=-i\hbar|c|^2\int \psi_r^\ast (x’) \frac{d}{dx’}\psi_r(x’)dx’
\newline
&=-i\hbar|c|^2\int \psi_r^\ast(x’)d\psi_r(x’)
\newline
&=-i\hbar|c|^2\int \psi_r(x’)d\psi_r(x’)=0
\end{align*}
$$ 最后一步用了左右边界处的值都趋于$0$的条件
Ex 4.2.3
$$
\begin{align*}
\braket{P}’&=\bra{\psi’}P\ket{\psi’}=\int\langle \psi’|x’\rangle \langle x’|P|\psi’\rangle dx’
\newline
&=\int e^{-ip_0 x’ /\hbar}\psi^\ast(x’) (-i\hbar\frac{d}{dx’})e^{ip_0 x’ /\hbar}\psi(x’)dx’
\newline
&=\int e^{-ip_0 x’ /\hbar}\psi^\ast(x’)p_0 e^{ip_0 x’ /\hbar}\psi(x’)dx’
\newline
& +\int e^{-ip_0 x’ /\hbar}\psi^\ast(x’) e^{ip_0 x’ /\hbar}(-i\hbar\frac{d}{dx’})\psi(x’)dx’
\newline
&=\int \psi^\ast(x’)p_0 \psi(x’)dx’+\int \psi^\ast(x’)(-i\hbar\frac{d}{dx’})\psi(x’)dx’
\newline
&=p_0+\braket{P}
\end{align*}
$$
4.3 notes
P146 对于$U(t)$的另一种写法的验证:
$$
\begin{align*}
U(t)|\psi(0)\rangle&=\sum_j \frac{(-i\hbar t H)^j}{j!}|\psi(0)\rangle
\newline
&=\sum_j\sum_E \frac{(-i\hbar t H)^j}{j!}|E\rangle \langle E|\psi(0)\rangle
\newline
&=\sum_j\sum_E \frac{(-i\hbar t E)^j}{j!}|E\rangle \langle E|\psi(0)\rangle
\newline
&=\sum_E e^{-iEt/\hbar}|E\rangle \langle E|\psi(0)\rangle
\end{align*}
$$
(已经使用了收敛半径为$\infty$以及Fubini定理)可见两种写法的统一。至于证明$U(t)$是等距同构:引用习题1.9.2即可。
4.3.15又用了等距同构的性质$U^\dagger U=I$,证明:
$$
\langle v|v\rangle=\langle Uv|Uv\rangle=\langle U^\dagger Uv|v\rangle
\newline
\newline
\therefore \langle (U^\dagger U-I)v|v\rangle=0 \quad\text{for}\forall v\in \mathbb{V} \text{on} \mathbb{C}
\newline
\newline
\therefore U^\dagger U=I
$$ 最后一步用的是复向量空间上作用在任意向量上使得该向量正交于原向量的都是零算子的结论。这暗示着归一性随时间变化一直成立。
此外,等距同构是可以完全用两组规范正交基之间的线性映射$U v_i=w_i$描述的,实质就是坐标架在空间的旋转
4.3.16的最后一步:
$$
U^{-1}(t_2,t_1)=(\prod_n H_n)^{-1}=\prod_n H_n^{-1}=U(t_1,t_2)
$$
Shankar_ch.5
P152 的propagator可以从$U(t)=e^{iHt/\hbar}$出发,注意要展开为$Ae^{iEt/\hbar}$的形式需要$H$作用等于乘个$E$,因此展开基一定得是$H$的本征向量组成的,此处用$\ket{p}$更好,一是因为$\ket{p}$本身也是$H$的本征向量,二是因为$\text{dim}E(E_i,H)=2$,因此用$E_i$展开有符号不便
Ex 5.1.1
$$
\begin{align*}
U(t)&=\int_{-\infty}^{\infty}\ket{p}\bra{p}e^{-iEt/\hbar}dp
\newline
&=\left(\int_{-\infty}^{0}+\int_0^\infty \right) \ket{p}\bra{p}e^{-iEt/\hbar}dp
\newline
&=\sum_{\alpha=\pm}\int_0^\infty \ket{E,\alpha}\bra{E,\alpha}e^{-iEt/\hbar}dp
\newline
&=\sum_{\alpha=\pm}\int_0^\infty \ket{E,\alpha}\bra{E,\alpha}e^{-iEt/\hbar} \frac{m}{(2mE)^{\frac{1}{2}}}dE
\end{align*}
$$
Ex 5.1.2
解ode而已;当$E<0$时由于指数,两项都会发散,不能描述真实物理情况
P153 5.1.11式的由来:
$$
\psi(x,t)=\langle x\ket{\psi(t)}=\langle x |U(t) |\psi(0)\rangle
\newline
\newline
=\int \langle x |U(t)|x’\rangle\langle x’ |\psi(0)\rangle dx’
\newline
\newline
=\int U(x,t;x’) \langle x’ |\psi(0)\rangle dx’=\dots
$$
Ex 5.1.3
$$
\sum_{n=0}^\infty \frac{1}{n!}\left(\frac{i\hbar t}{2M}\right)^n \frac{d^{2n}}{dx^{2n}} \pi^{-1/4}\sum_{m=0}^\infty \frac{(-1)^m x^{2m}}{m!2^m}
$$
考虑单一项作用得到的级数:
$$
\frac{d^{2n}}{dx^{2n}}\sum_{m=0}^\infty \frac{(-1)^m x^{2m}}{m!2^m}=\sum_{m=n}^\infty \frac{(2m)!}{(2m-2n)!}\frac{(-1)^m x^{2m-2n}}{m!2^m}
$$
代入:
$$
\begin{align*}
&=\pi^{-\frac{1}{4}} \sum_{n=0}^\infty \frac{1}{n!} \left(\frac{-i\hbar t}{2M}\right)^n \sum_{l=0}^\infty \frac{(2n+2l)!}{(2l)!}\frac{(-1)^{l} x^{2l}}{(l+n)!2^{l+n}}
\newline
\newline
&=\pi^{-\frac{1}{4}} \sum_{l=0}^\infty\sum_{n=0}^\infty \frac{1}{n!} \left(\frac{-i\hbar t}{2M}\right)^n \frac{(2n+2l)!}{(2l)!}\frac{(-1)^{l} x^{2l}}{(l+n)!2^{l+n}}
\newline
\newline
&=\pi^{-\frac{1}{4}} \sum_{l=0}^\infty\sum_{n=0}^\infty \frac{1}{n!} \left(\frac{-i\hbar t}{4M}\right)^n \frac{(2n+2l)!}{(l+n)!}\frac{(-1)^{l} x^{2l}}{(2l)!2^{l}}
\newline
\newline
&=\pi^{-\frac{1}{4}} \sum_{l=0}^\infty\sum_{n=0}^\infty \frac{1}{n!} \left(\frac{-i\hbar t}{4M}\right)^n \left[2^{2(n+l)}(n+l-\frac{1}{2})(n+l-\frac{3}{2})\dots\right]\frac{(-1)^{l} x^{2l}}{(2l)!2^{l}}
\newline
\newline
&=\pi^{-\frac{1}{4}} \sum_{l=0}^\infty\sum_{n=0}^\infty \frac{1}{n!} \left(\frac{-i\hbar t}{M}\right)^n \left[(n+l-\frac{1}{2})(n+l-\frac{3}{2})\dots\right]\frac{(-2)^{l} x^{2l}}{(2l)!}
\newline
\newline
&=\sum_{l=0}^\infty\frac{\pi^{-\frac{1}{4}}(-2)^{l} x^{2l}}{(2l)!}\sum_{n=0}^\infty \frac{1}{n!} \left(\frac{-i\hbar t}{M}\right)^n \left[(n+l-\frac{1}{2})(n+l-\frac{3}{2})\dots\right]
\newline
\newline
&=\sum_{l=0}^\infty\frac{\pi^{-\frac{1}{4}}(-2)^{l} x^{2l}}{(2l)!}\sum_{n=0}^\infty \frac{1}{n!} \left(\frac{-i\hbar t}{M}\right)^n \left[(n+l-\frac{1}{2})(n+l-\frac{3}{2})\dots(l+\frac{1}{2})\right]
\newline
&\times\left[(l-\frac{1}{2})(l-\frac{3}{2})\dots \frac{1}{2}\right]
\newline
\newline
&=\sum_{l=0}^\infty\frac{\pi^{-\frac{1}{4}}(-2)^{l} x^{2l}}{(2l)!}(1+\frac{i\hbar t}{M})^{-l-1/2}[\frac{(2l-1)!!}{2^l}]
\newline
\newline
&=\sum_{l=0}^\infty\frac{\pi^{-\frac{1}{4}}(-1)^{l} x^{2l}}{(2l)!!}(1+\frac{i\hbar t}{M})^{-l-1/2}
\newline
\newline
&=\sum_{l=0}^\infty\frac{\pi^{-\frac{1}{4}}(-\frac{1}{2}x^2)^{l}}{l!}(1+\frac{i\hbar t}{M})^{-l-1/2}
\newline
\newline
&=\pi^{-\frac{1}{4}} (1+\frac{i\hbar t}{M})^{-1/2} \sum_{l=0}^\infty\frac{(-\frac{1}{2}x^2)^{l}}{l!}(1+\frac{i\hbar t}{M})^{-l}
\newline
\newline
&=\pi^{-\frac{1}{4}} (1+\frac{i\hbar t}{M})^{-1/2} \exp{\left(\frac{-\frac{1}{2}x^2}{1+\frac{i\hbar t}{M}}\right)}
\end{align*}
$$
Ex 5.2.1
需要注意undisturbed 不考虑之后的演化,相当于立即测量,求该函数在新基态上的分量大小,算$\langle n’| \psi\rangle$即可
Ex 5.2.2
(a)
$$
\bra{\psi}H\ket{\psi}=\int\bra{\psi}H\ket{E}\langle E|\psi\rangle dE=\int E \langle\psi|E\rangle \langle E|\psi\rangle dE
\newline
\newline
\geq \int E_0 \langle\psi|E\rangle \langle E|\psi\rangle dE=E_0
$$
(b) 在hint中之所以可以用$\bra{\psi_\alpha}H\ket{\psi_\alpha}$的方法去算能量$E(\alpha)$是因为$\psi_\alpha$已经是规范正交基了,具体计算略……最后得到一个$\alpha$的函数,可以取到$E(\alpha)<0$
Ex 5.2.3
没有别的bound state了,此题参见顾樵数学物理方法 P76 例7,两边同时Fourier Transform
$$
\frac{d^2 \psi}{dx^2}-k^2\psi=-A\delta(x)\psi -\omega^2 \mathscr{F} [\psi] (\omega)- k^2 \mathscr{F}[\psi] (\omega)=-A\psi(0)
$$
其中$k=\sqrt{-\frac{2mE}{\hbar^2}};A=\frac{2m\alpha}{\hbar^2}$(注意是束缚态去掉分类讨论之嫌),这样算出$\mathscr{F}[\psi] (\omega)$后,再反解得到:
$$
\psi(x)=\frac{A\psi(0)}{2k}e^{-k|x|}
$$ 这其实限制了$A$与$k$的关系,只有$E=-\frac{m\alpha^2}{2\hbar^2}$一个能量的值
Ex 5.2.4
$$
\langle x|\psi\rangle=\psi(x)=\begin{cases}
\left( \frac{2}{L}\right)^{1/2}\cos\left(\frac{n\pi x}{L}\right) ,&n=1,3,5 \dots\\
\left( \frac{2}{L}\right)^{1/2}\sin\left(\frac{n\pi x}{L}\right) ,&n=2,4,6 \dots\\
\end{cases}
$$ 能量$E_n=\frac{\hbar^2 \pi^2 n^2}{2mL^2}$,当$L$变化时:
$$
-\frac{\partial E}{\partial L}=\frac{\hbar^2 \pi^2 n^2}{mL^3}=\frac{2E_n}{L}
$$
经典考量一个小球,$2L/v$的间隔发生碰撞产生动量变化$2mv$,则平均的力大小为$F=mv^2/L=2E/L$,对应
Ex 5.2.6
考虑定态方程$H\ket{\psi}=E\ket{\psi}$
$$
\psi^2(x)+\frac{2m}{\hbar^2}(E-V)\psi=0
$$ 注意分析中间区域时,和无限深方势阱一样有$E>0$的要求,原因是如果$E<0$,那在交接地带无法做到$\psi’(x)$连续。此外,在两边必须$E-V<0$指数衰减,因为若不然,就是三角函数振荡,不符合可积要求
$$
\psi_2(x)=A\cos kx
\quad
\psi_3(x)=Be^{-\kappa x}
$$
其中$k=\sqrt{\frac{2mE}{\hbar^2}}$,$\kappa=\sqrt{-\frac{2m(E-V)}{\hbar^2}}$,衔接条件:
$$
A\cos \frac{Lk}{2}=B e^{-\kappa L/2}
\quad
-Ak\sin\frac{Lk}{2}=-\kappa Be^{-\kappa L/2}
$$ 相除就得到答案中的两个式子,奇的情况同(在数理方法中处理第三类边界条件很像)有意思的是:
$$
k^2+\kappa^2=\frac{2mV_0}{\hbar^2}
$$ 采用图解法,换元如书中所述:
$$
\alpha^2+\beta^2=\frac{2ma^2V_0}{\hbar^2}
$$
上述两个式子就成为:
$$
\beta=\alpha \tan \alpha \quad ; \quad \beta=-\alpha \cot \alpha
$$
偶解: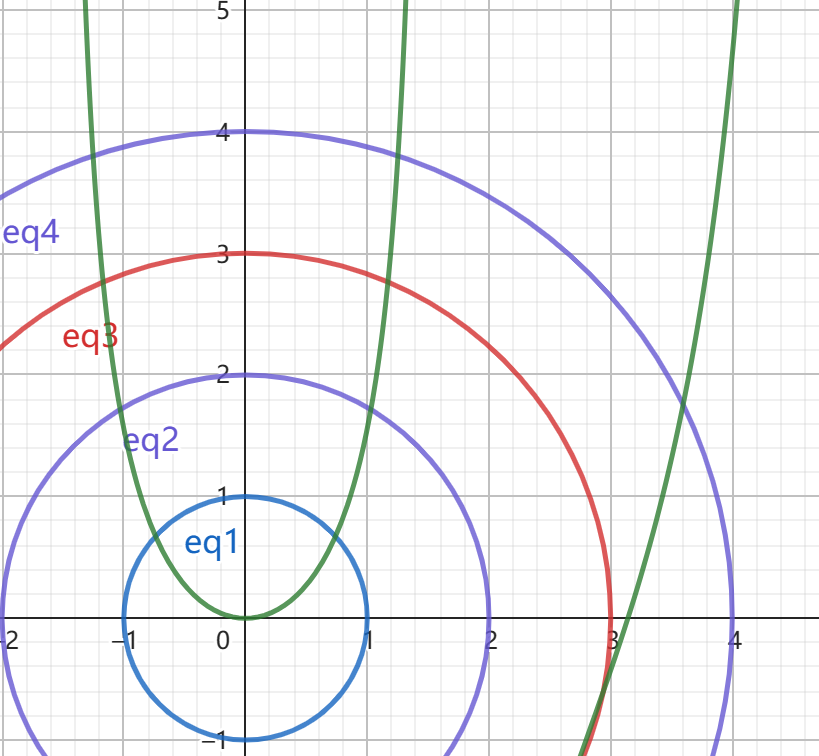
奇解: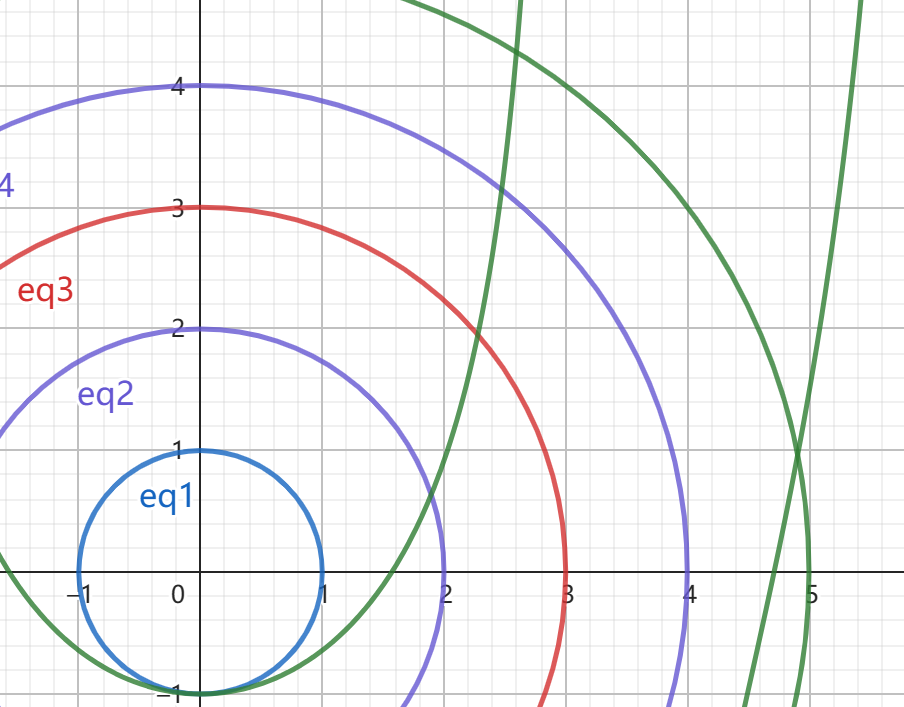
可以看出后一个图中,当半径小时有可能没有交点,对应(注意只关注第一象限,只用看x轴,在别的象限有交点是无所谓的):
$$
\text{Radius}=a\sqrt{\frac{2mV_0}{\hbar^2}}=\frac{\pi}{2}
$$
此即临界势能
Ex 5.3.1
此处的复势函数即可用来描述粒子消失的情况。验证非自伴:
$$
\begin{align*}
&\int \psi^\ast \left(-\frac{\hbar^2}{2m}\nabla^2+V_r+iV_i\right)\psi dx
\newline
\newline
=&\int \psi^\ast \left(-\frac{\hbar^2}{2m}\nabla^2\right)\psi dx+\int \psi^\ast (V_r+iV_i)\psi dx
\newline
\newline
=&\int \left(\left(-\frac{\hbar^2}{2m}\nabla^2\right)\psi\right)^\ast \psi dx+\int V_r\psi^\ast \psi dx+\int (-iV_i\psi)^\ast \psi dx
\end{align*}
$$
最后一项出现负号不再和原来的算符一样。若势含虚部,在推导中会出现$2iV_i\psi^\ast \psi$整理等式两边时多出:
$$
\frac{\partial }{\partial t}(\psi^\ast \psi)=\frac{2V_i}{\hbar} \psi^\ast \psi
$$ 解此附加项即得指数衰减形式
Ex 5.3.2
代入$j$表达式显然$\psi^\ast \nabla \psi-\psi\nabla \psi^\ast$一项消失
Ex 5.3.3
$$
\begin{align*}
P&=\psi^\ast\psi=\frac{1}{(2\pi\hbar)^3}
\newline
\newline
\vec{j}&=\frac{\hbar}{2mi}(\psi^\ast \nabla \psi-\psi\nabla \psi^\ast)
\newline
\newline
&=\frac{\hbar}{2mi}\left(\frac{1}{(2\pi\hbar)^3}\frac{2i\vec{p}}{\hbar}\right)=\frac{1}{(2\pi\hbar)^3}\frac{\vec{p}}{m}
\end{align*}
$$
跳过散射一节
Theorem 15 说的是一维束缚态无简并情况,这个简并指的是$H$的本征态
Theorem 16 说的是采用实本征函数是可行的且不会因此丧失一般性
Shankar_ch.6
算子$\frac{-i}{\hbar}H$的共轭是$\frac{i}{\hbar}H$,因为$(AB)^\dagger=B^\dagger A^\dagger$,且两者显然交换,且哈密顿算子自伴
书中给出了一个广义的Ehrenfest Theorem:
$$
\frac{d}{dt}\braket{\Omega}=\frac{-i}{\hbar}\braket{[\Omega, H]}
$$